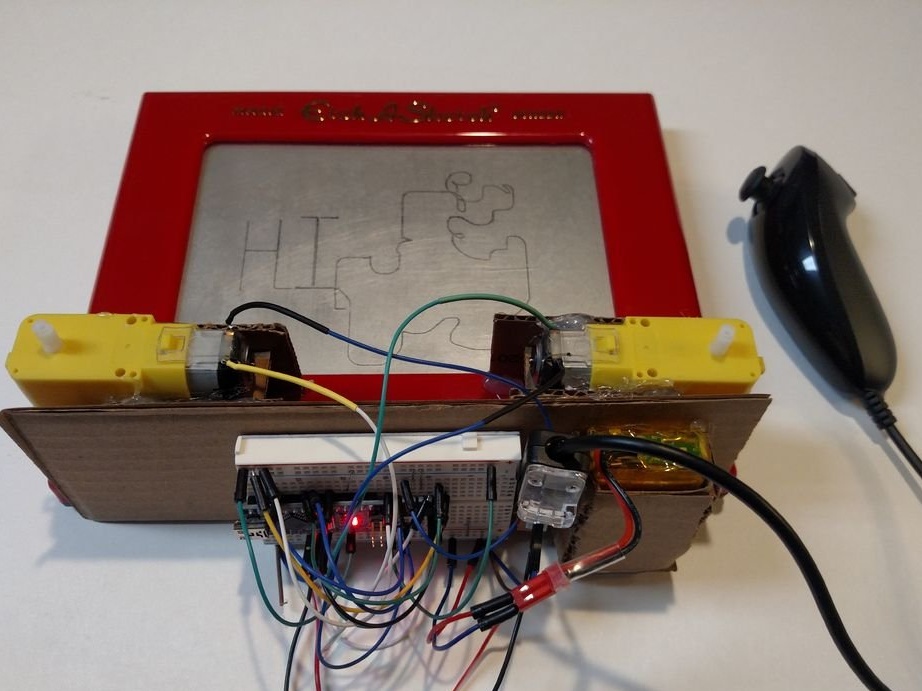
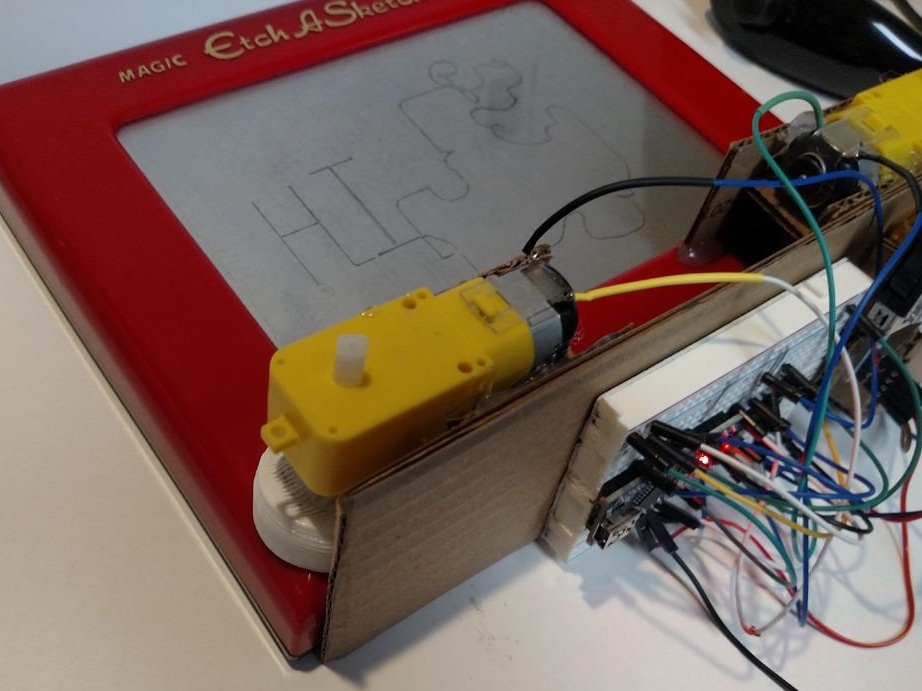
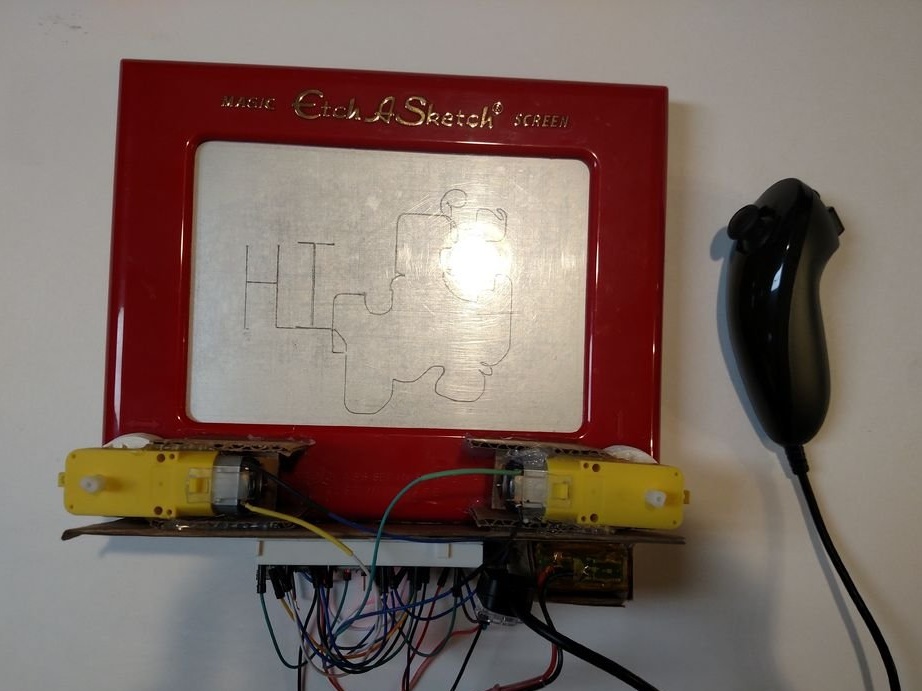
Many had this toy in childhood; we controlled it with two rotary knobs. Even then, it was possible to attach two DC motors with gears to it and control them from the buttons. And now for this it has become possible to adapt the joysticks. Which is what the author of Instructables did under the nickname millerman4487.
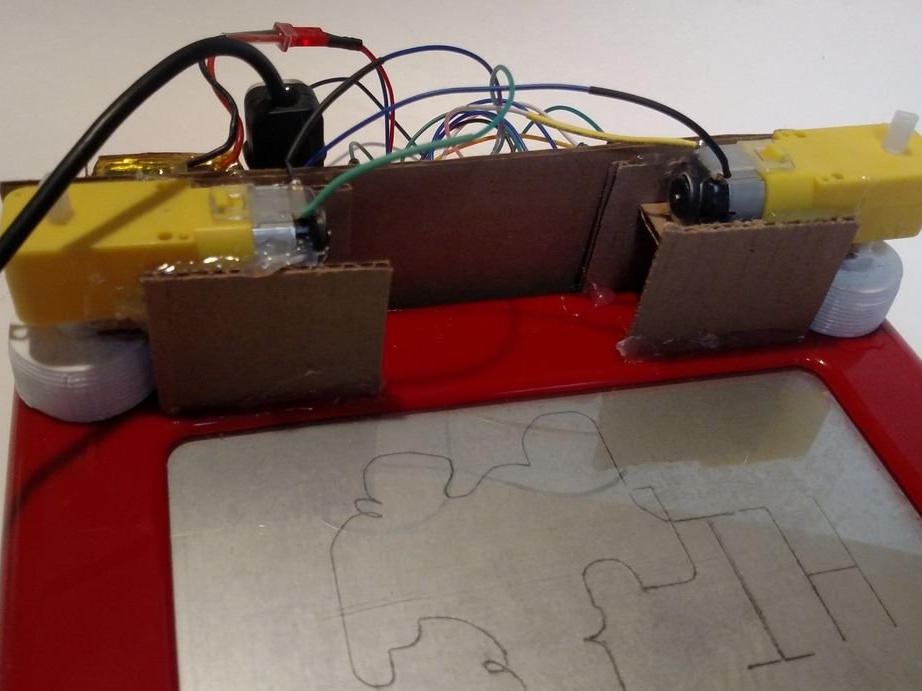
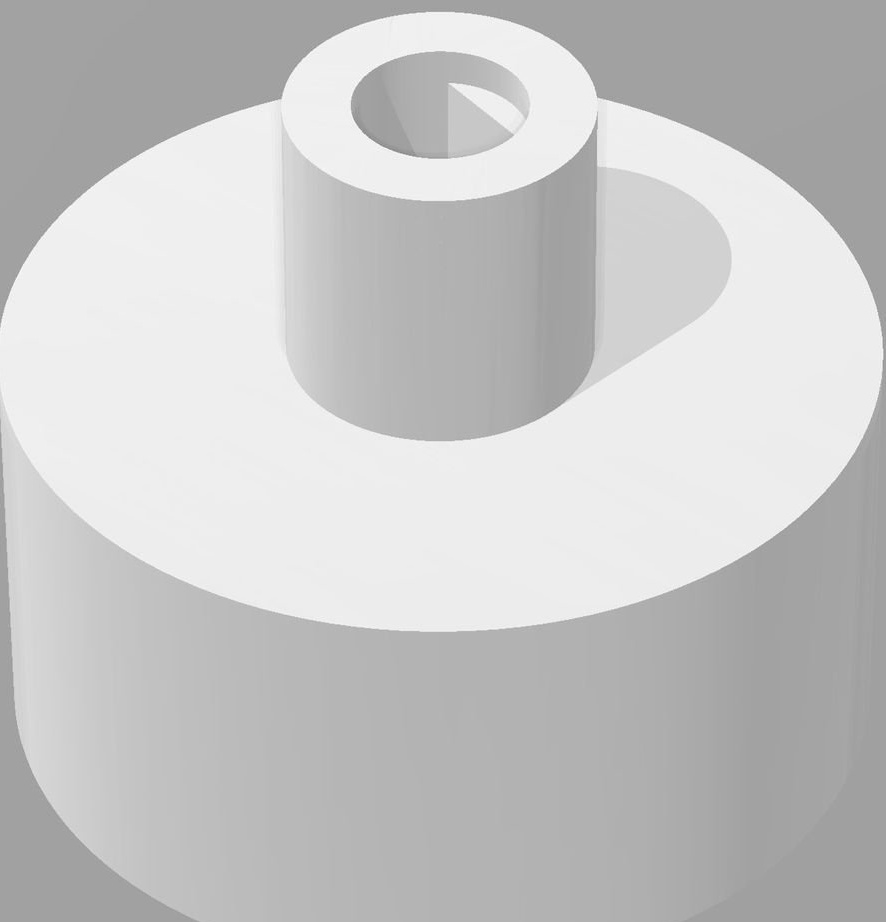
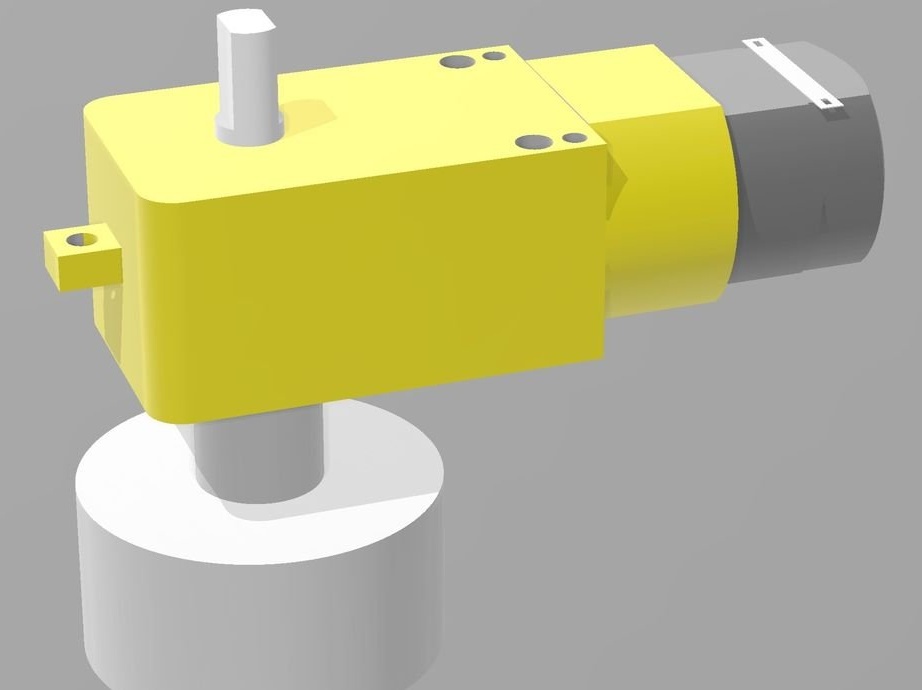
But two identical parts had to be printed - these are adapters for connecting gears to the Magic Screen handles. It looks like any of the adapters:
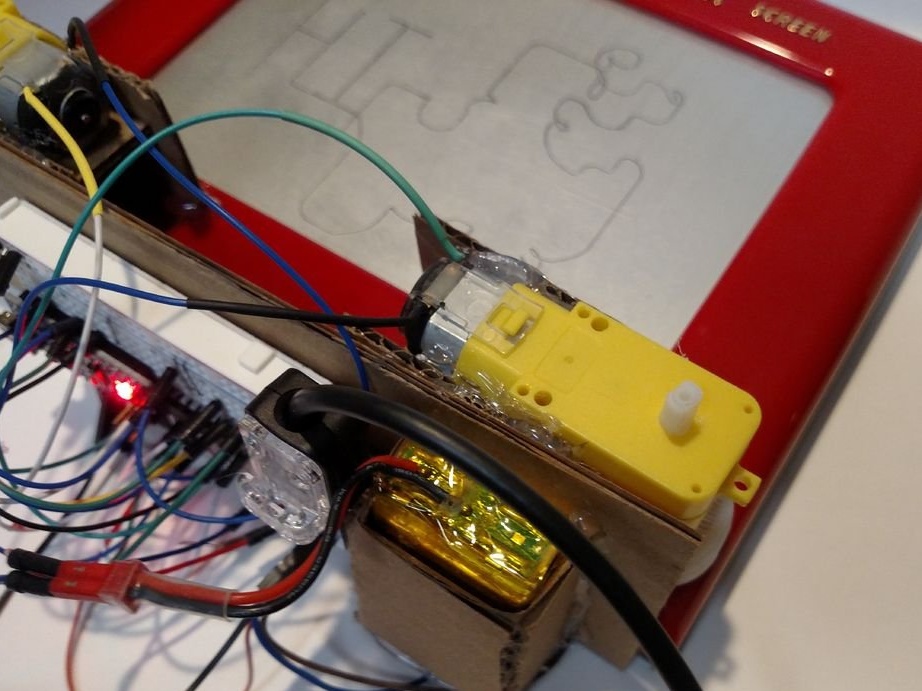
And so it connects to the gearbox (perhaps this will require slightly warming the adapter with a hairdryer):
STL file.
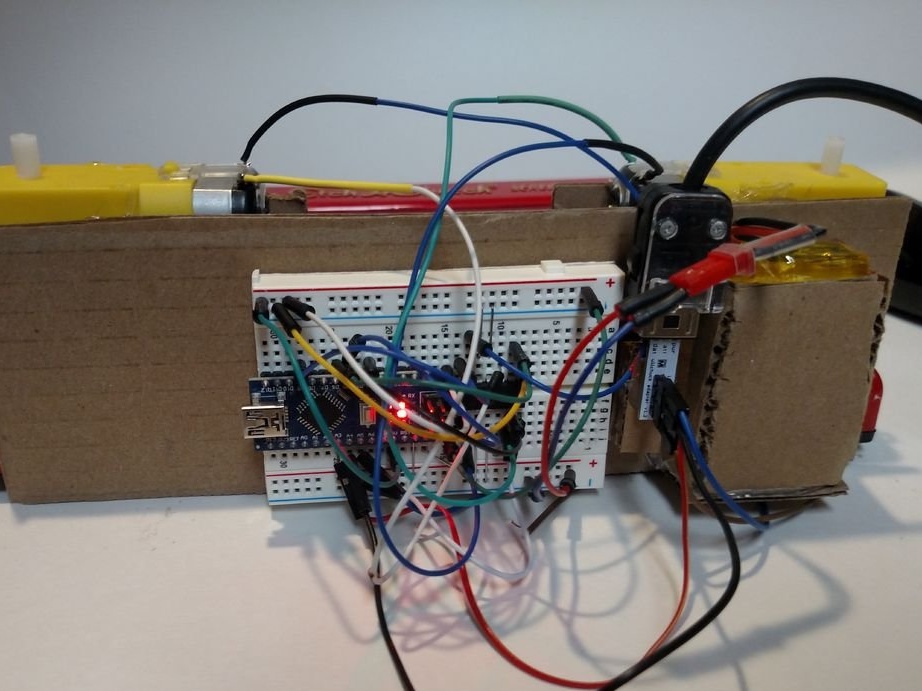
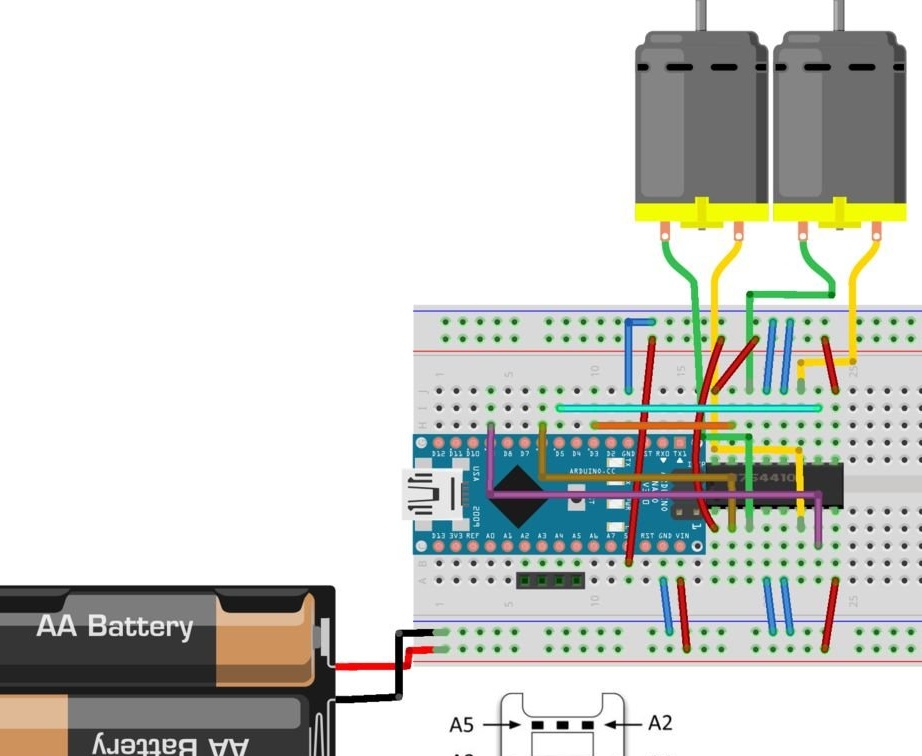
There is only one incomprehensible component on it - the L293D chip. It contains two so-called H-bridges, each of which can reverse the motor connected to it. Below the board it is shown which conclusions
Connect which of the pins of the Wii Nunchuck joystick connector. The sketch below can be rewritten to work with any other types of joysticks, in its current form it will be required.
#include
#if (ARDUINO & gt; = 100)
#include
#else
#include
// # define Wire.write (x) Wire.send (x)
// # define Wire.read () Wire.receive ()
#endif
static uint8_t nunchuck_buf [6]; // array to store nunchuck data,
// Uses port C (analog in) pins as power & ground for Nunchuck
static void nunchuck_setpowerpins () {
#define pwrpin PORTC3
#define gndpin PORTC2
DDRC | = _BV (pwrpin) | _BV (gndpin);
PORTC & = ~ _BV (gndpin);
PORTC | = _BV (pwrpin);
delay (100); // wait for things to stabilize
}
// initialize the I2C system, join the I2C bus,
// and tell the nunchuck we're talking to it
static void nunchuck_init () {
Wire.begin (); // join i2c bus as master
Wire.beginTransmission (0x52); // transmit to device 0x52
#if (ARDUINO & gt; = 100)
Wire.write ((uint8_t) 0x40); // sends memory address
Wire.write ((uint8_t) 0x00); // sends sent a zero.
#else
Wire.send ((uint8_t) 0x40); // sends memory address
Wire.send ((uint8_t) 0x00); // sends sent a zero.
#endif
Wire.endTransmission (); // stop transmitting
}
// Send a request for data to the nunchuck
// was "send_zero ()"
static void nunchuck_send_request () {
Wire.beginTransmission (0x52); // transmit to device 0x52
#if (ARDUINO & gt; = 100)
Wire.write ((uint8_t) 0x00); // sends one byte
#else
Wire.send ((uint8_t) 0x00); // sends one byte
#endif
Wire.endTransmission (); // stop transmitting
}
// Encode data to format that most wiimote drivers except
// only needed if you use one of the regular wiimote drivers
static char nunchuk_decode_byte (char x) {
x = (x ^ 0x17) + 0x17;
return x;
}
// Receive data back from the nunchuck,
// returns 1 on successful read. returns 0 on failure
static int nunchuck_get_data () {
int cnt = 0;
Wire.requestFrom (0x52, 6); // request data from nunchuck
while (Wire.available ()) {
// receive byte as an integer
#if (ARDUINO & gt; = 100)
nunchuck_buf [cnt] = nunchuk_decode_byte (Wire.read ());
#else
nunchuck_buf [cnt] = nunchuk_decode_byte (Wire.receive ());
#endif
cnt ++;
}
nunchuck_send_request (); // send request for next data payload
// If we recieved the 6 bytes, then go print them
if (cnt & gt; = 5) {
return 1; // success
}
return 0; // failure
}
// Print the input data we have recieved
// accel data is 10 bits long
// so we read 8 bits, then we have to add
// on the last 2 bits. That is why I
// multiply them by 2 * 2
static void nunchuck_print_data () {
static int i = 0;
int joy_x_axis = nunchuck_buf [0];
int joy_y_axis = nunchuck_buf [1];
int accel_x_axis = nunchuck_buf [2]; // * 2 * 2;
int accel_y_axis = nunchuck_buf [3]; // * 2 * 2;
int accel_z_axis = nunchuck_buf [4]; // * 2 * 2;
int z_button = 0;
int c_button = 0;
// byte nunchuck_buf [5] contains bits for z and c buttons
// it also contains the least significant bits for the accelerometer data
// so we have to check each bit of byte outbuf [5]
if ((nunchuck_buf [5] & gt; & gt; 0) & 1)
z_button = 1;
if ((nunchuck_buf [5] & gt; & gt; 1) & 1)
c_button = 1;
if ((nunchuck_buf [5] & gt; & gt; 2) & 1)
accel_x_axis + = 1;
if ((nunchuck_buf [5] & gt; & gt; 3) & 1)
accel_x_axis + = 2;
if ((nunchuck_buf [5] & gt; & gt; 4) & 1)
accel_y_axis + = 1;
if ((nunchuck_buf [5] & gt; & gt; 5) & 1)
accel_y_axis + = 2;
if ((nunchuck_buf [5] & gt; & gt; 6) & 1)
accel_z_axis + = 1;
if ((nunchuck_buf [5] & gt; & gt; 7) & 1)
accel_z_axis + = 2;
Serial.print (i, DEC);
Serial.print ("\ t");
Serial.print ("joy:");
Serial.print (joy_x_axis, DEC);
Serial.print (",");
Serial.print (joy_y_axis, DEC);
Serial.print ("\ t");
Serial.print ("acc:");
Serial.print (accel_x_axis, DEC);
Serial.print (",");
Serial.print (accel_y_axis, DEC);
Serial.print (",");
Serial.print (accel_z_axis, DEC);
Serial.print ("\ t");
Serial.print ("but:");
Serial.print (z_button, DEC);
Serial.print (",");
Serial.print (c_button, DEC);
Serial.print ("\ r \ n"); // newline
i ++;
}
// returns zbutton state: 1 = pressed, 0 = notpressed
static int nunchuck_zbutton () {
return ((nunchuck_buf [5] & gt; & gt; 0) & 1)? 0-1 // voodoo
}
// returns zbutton state: 1 = pressed, 0 = notpressed
static int nunchuck_cbutton () {
return ((nunchuck_buf [5] & gt; & gt; 1) & 1)? 0-1 // voodoo
}
// returns value of x-axis joystick
static int nunchuck_joyx () {
return nunchuck_buf [0];
}
// returns value of y-axis joystick
static int nunchuck_joyy () {
return nunchuck_buf [1];
}
// returns value of x-axis accelerometer
static int nunchuck_accelx () {
return nunchuck_buf [2]; // FIXME: this leaves out 2-bits of the data
}
// returns value of y-axis accelerometer
static int nunchuck_accely () {
return nunchuck_buf [3]; // FIXME: this leaves out 2-bits of the data
}
// returns value of z-axis accelerometer
static int nunchuck_accelz () {
return nunchuck_buf [4]; // FIXME: this leaves out 2-bits of the data
}
int loop_cnt = 0;
byte joyx, joyy, zbut, cbut, accx, accy, accz;
void _print () {
Serial.print ("\ tX Joy:");
Serial.print (map (joyx, 15, 221, 0, 255));
Serial.print ("\ tY Joy:");
Serial.println (map (joyy, 29, 229, 0, 255));
}
int joyx1 = 129; // 15 - 221
int joyy1 = 124; // 29 - 229
void setup () {
Serial.begin (9600);
nunchuck_setpowerpins ();
nunchuck_init (); // send the initilization handshake
Serial.println ("Wii Nunchuck Ready");
pinMode (3, OUTPUT);
pinMode (5, OUTPUT);
pinMode (6, OUTPUT);
pinMode (9, OUTPUT);
// type ();
}
void loop () {
if (loop_cnt & gt; 10) {// every 100 msecs get new data
loop_cnt = 0;
nunchuck_get_data ();
zbut = nunchuck_zbutton ();
joyx = nunchuck_joyx (); // 15 - 221
joyy = nunchuck_joyy (); // 29 - 229
_print ();
}
loop_cnt ++;
if (zbut == 1) {
type ();
zbut = 0;
}
else {
if (joyx & gt; (joyx1 + 20)) {
int speed1 = map (joyx - joyx1, 0, 80, 40, 255);
speed1 = constrain (speed1, 0, 255);
analogWrite (6, 0);
analogWrite (9, speed1);
}
else if (joyx & lt; (joyx1 - 20)) {
int speed2 = map (joyx1 - joyx, 0, 90, 40, 255);
speed2 = constrain (speed2, 0, 255);
analogWrite (6, speed2);
analogWrite (9, 0);
}
else {
analogWrite (6, 0);
analogWrite (9, 0);
}
if (joyy & gt; (joyy1 + 20)) {
int speed3 = map (joyy - joyy1, 0, 80, 40, 255);
speed3 = constrain (speed3, 0, 255);
analogWrite (3, 0);
analogWrite (5, speed3);
}
else if (joyy & lt; (joyy1 - 20)) {
int speed4 = map (joyy1 - joyy, 0, 90, 40, 255);
speed4 = constrain (speed4, 0, 255);
analogWrite (3, speed4);
analogWrite (5, 0);
}
else {
analogWrite (3, 0);
analogWrite (5, 0);
}
}
delay (1);
}
void type () {
int rltime = 200;
// digitalWrite (6, 1); // origin
// digitalWrite (9, 0);
// digitalWrite (3, 1);
// digitalWrite (5, 0);
// delay (1000);
// H ===============
// digitalWrite (3, 0); // wait
// digitalWrite (5, 0);
// digitalWrite (6, 0);
// digitalWrite (9, 0);
// delay (250);
// digitalWrite (3, 0); // up
digitalWrite (5, 1);
delay (500);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (3, 1); // down
// digitalWrite (5, 0);
delay (250);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
// digitalWrite (6, 0); // right
digitalWrite (9, 1);
delay (rltime);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
// digitalWrite (3, 0); // up
digitalWrite (5, 1);
delay (250);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (3, 1); // down
// digitalWrite (5, 0);
delay (500);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
// digitalWrite (6, 0); // right
digitalWrite (9, 1);
delay (rltime);
// I ==========================
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (3, 0); // up
digitalWrite (5, 1);
delay (500);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (6, 0); // right
digitalWrite (9, 1);
delay (100);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (6, 1); // left
digitalWrite (9, 0);
delay (rltime);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (6, 0); // right
digitalWrite (9, 1);
delay (100);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (3, 1); // down
digitalWrite (5, 0);
delay (500);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (6, 0); // right
digitalWrite (9, 1);
delay (100);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
digitalWrite (6, 1); // left
digitalWrite (9, 0);
delay (rltime);
digitalWrite (3, 0); // wait
digitalWrite (5, 0);
digitalWrite (6, 0);
digitalWrite (9, 0);
delay (250);
}
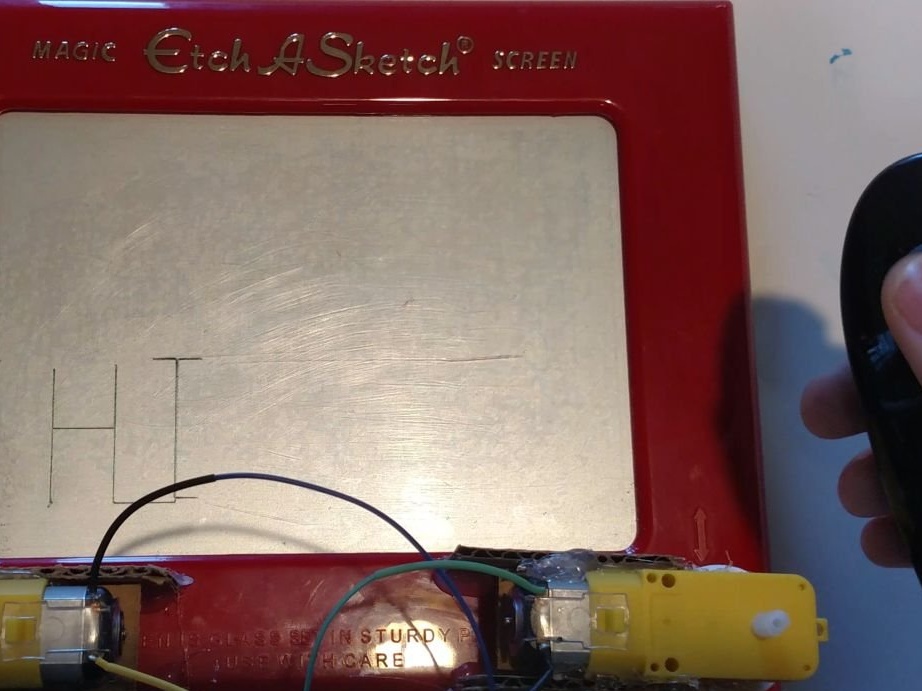
After switching on, a correctly assembled device starts working immediately. Nunchuck is an analog joystick, so you can control not only the direction, but also the speed of movement. Arduino takes over the PWM speed control. If movement along any of the axes occurs in the opposite direction, the corresponding motor must be reversed. By placing the cursor approximately in the middle of the screen and pressing the Z button, you can make the device automatically write the word HI.