
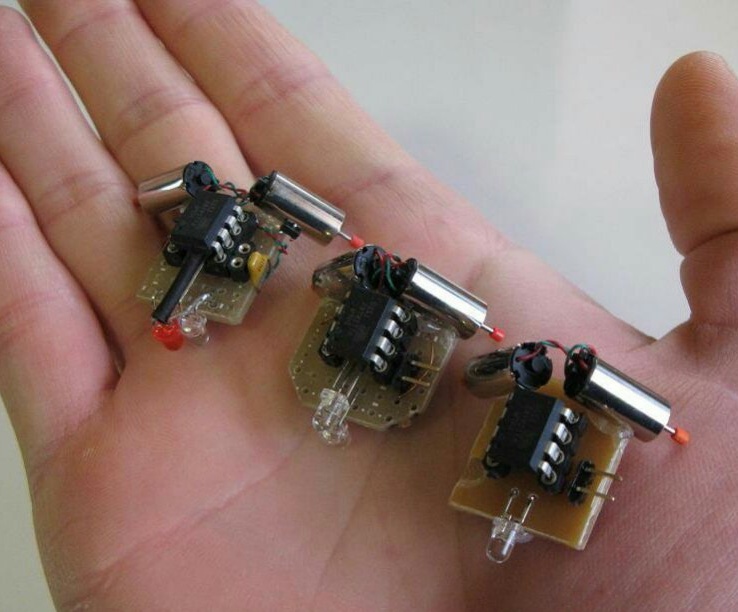
A robot following a line or performing another simple algorithm will not surprise anyone for a long time. Unless, of course, he is not as miniature as these three homemade author under the nickname shlonkin. If you look at them front and bottom, it becomes clear how they differ from each other:

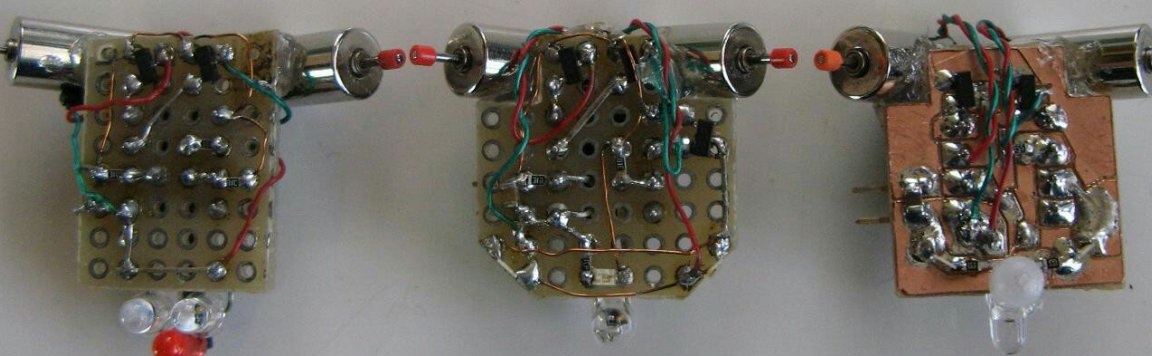
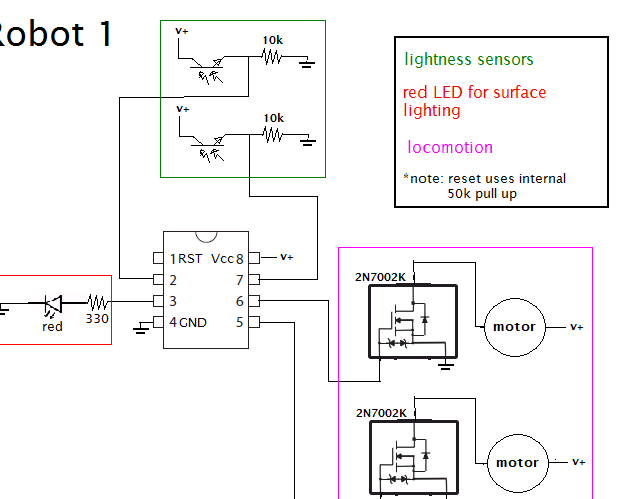
In the first robot, both phototransistors are directed down, and there is another LED, also directed down. It can determine the current brightness of the surface under each of them and its change when moving. In particular, it can be programmed to act like a classic robotfollowing the line:
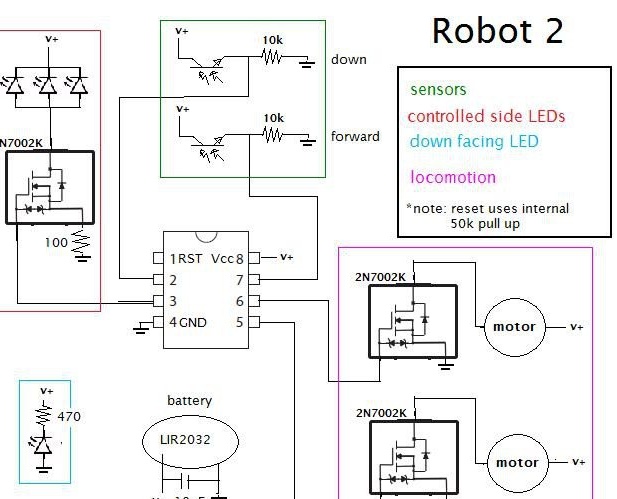
In the second robot, only one of the two phototransistors is directed down. Therefore, he cannot follow the line, because he cannot determine in which direction to turn. But thanks to the second phototransistor, directed forward, it determines the brightness of the light source located in front or the illuminance of the surface of the object in front. The robot also has three parallel LEDs, two of which shine forward and slightly to the side, and the third - down. You can manage them only at the same time.
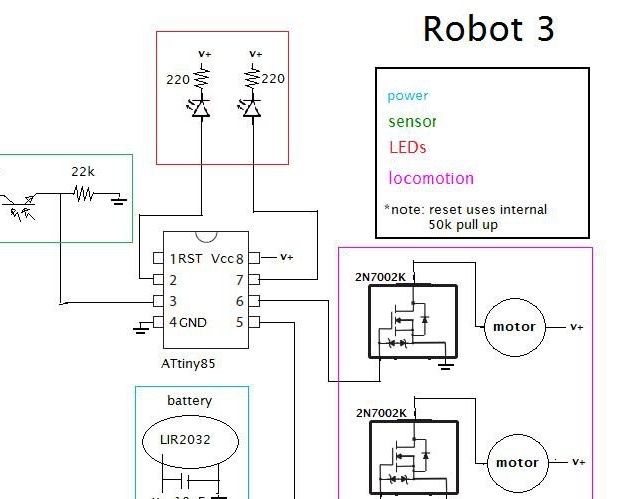
The third robot has one phototransistor directed forward, and on the sides of it there are two independently controlled LEDs, also directed forward. Switching them alternately, according to the signal from the phototransistor, you can determine which side of the obstacle, and go around it. Software support for this feature is not yet ready. Due to the fact that the robot does not have a phototransistor pointing down, it was necessary to place a stop below.
All three robots are made on ATtiny85 microcontrollers and are powered by LIR2032 batteries, which are the same size as CR2032 cells, but, unlike them, are rechargeable. In Japan, where the author lives, such batteries can be bought as part of rechargeable flashlights in stores "all for 100 yen." Due to the fact that the number of phototransistors and LEDs in microrobots is different, their circuits are also different. But in all cases, the motors are controlled by very interesting 2N7002K MOS transistors with built-in protective diodes and zener diodes. In the second robot, where three LEDs are parallelized, they are connected to the microcontroller not directly, but through a key on the same transistor.
All phototransistors are used as ASDL-6620 type, electric motors - from pagers popular in the past. From the similar engines used today in mobile phones, they differ in size. The eccentrics are removed from the motor shafts, instead of them the rollers are put on from the tube.
Software for robots is available in two versions. of which is intended for Arduino The IDE, another removed from Github (the link is broken in the original, therefore it is not shown here), is written in C ++, but it still uses Arduin libraries. The first microrobot running this software acts as a classic robot following the line, the second one examines the surface and gives light signals to other robots of the same kind, and the third will go around obstacles after the developer completes this part of the software. The first two robots are assembled on perfboard type breadboards, the third on a printed circuit board.