

One more all-terrain vehicle with a loud name "Terminator" from the Yamalo-Nenets Autonomous Okrug.
The author decided to build an all-terrain vehicle according to the 4 by 4 scheme. A rather impressive all-terrain vehicle was planned with a length of 4.6 meters and a width of 2.4 meters. The mass of the all-terrain vehicle will reach one and a half tons. One of the features of the all-terrain vehicle will be the ability to turn all 4 wheels. The diameter of the wheel is 1200. The maximum speed of the all-terrain vehicle will be under 60 km \ hour.
For the construction of the all-terrain vehicle, the following parts and designs were involved:
1) CUBOT turbocharged internal combustion engine with a capacity of 45 horsepower.
2) What is noteworthy, this is an all-terrain vehicle chassis, its author borrowed from an armored personnel carrier, namely, two front axles were taken, which in the future will be the front and rear axles of the four-wheel Terminator all-terrain vehicle.
3) Wheels from VI-203, from which part of the layers will be removed to facilitate.
4) Transfer box from the Niva.
Next, we consider the phased assembly of the Terminator all-terrain vehicle in more detail.
To begin with, the author decided to proceed with the assembly of the car frame, which at the same time will go into the frame for the outer skin of the future all-terrain vehicle:



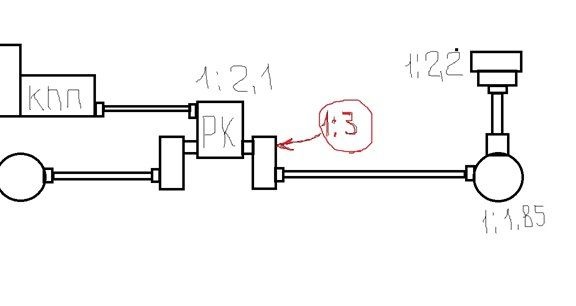
The image below shows the wheel gears, their gear ratio 2.2 .:

Separately, I would like to write about the mass of the all-terrain vehicle and the design features associated with this.
The differential has an aluminum case, which slightly reduces weight, moreover, the differential itself was shortened to a width of 45 centimeters, and its total weight was about 45 kilograms. Wheel reducers, which were depicted in the picture above, have a mass of 45-50 kilograms. And the intermediate driveshafts came out at 12 kg each. The only very torsion bars turned out to be very heavy, about 60-65 kilograms, they will probably have to be replaced with home-made levers from pipes (in the form of trapezoids).
Calculations were also made, which showed that when installing the transfer case from Niva, a downshift should be made at least 1 to 2.5, or even 1 to 3. That is, if you lower 3 speeds to the first, the speed of the all-terrain vehicle will be about 6 kilometers / hour at 3000 rpm per minute of the engine. A Estimated maximum speed of about 55 kilometers per hour.
In essence, it will look like this, although alterations of the structure and its simplification are quite acceptable (for example, disabling the front axle and combining the outputs from the transfer case).
Transmission brakes were installed, located on the driveshafts of the front and rear gears. The future sealed body, or rather its bottom, the body itself will be 2 mm thick at the bottom and 1 mm on the sides.
Here is a view of the cabin:

There is a hatch and a door in front, and the hatch will be two pieces, one for the passenger, the second for the driver.
And here is the back door:

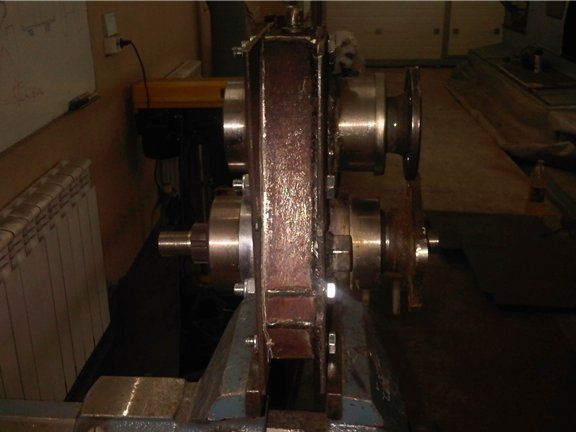
Here is a photo of the gearbox from the back (the place where the cardan shaft enters into it, as well as the mounting location))

Approximate steering link arrangement for driving all four wheels:
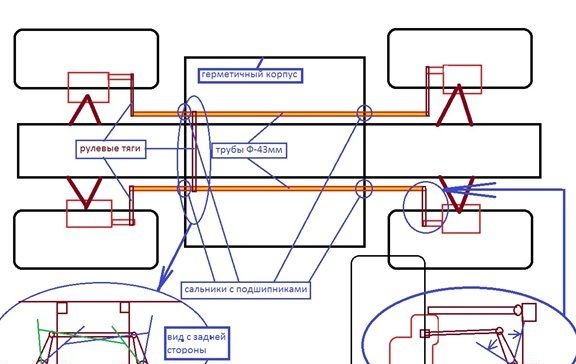
The essence is that two pipes each turn their own pair of wheels, moreover, they are connected by a rod in the middle of the body, and a cylinder of a hydraulic power steering with a steering rod is mounted to it. All this comes out much easier than four standard swivel arms from an armored personnel carrier.
For sealing purposes, pipes pass through a sealed housing and are held in bearings with gaskets.
The author is not going to assemble a standard lever, of course, but with an all-terrain vehicle, four turning wheels compensate for a small angle of rotation on one axis. Still, the rotary fists of the armored troopers are really heavy and they need as many as 4 pieces of 15 kilograms each. an extra 60 kilograms of weight is unnecessary for this machine.
The wheels of the Vi-203, which consist of 14 layers, were purchased, so they should be peeled to reduce weight.

Also, in order to save the same weight, and facilitate the all-terrain vehicle, the suspension arms will be redone:

After the car was practically started up in boxing conditions, the following conclusion was made: in a reduced gear at 3000 rpm, the all-terrain vehicle speed will be 5.7 kilometers per hour, and in a higher gear at the same engine speeds, 49.8 kilometers per hour. these calculations were made under the condition of a gearbox reduction ratio of 1 to 2.
Angle of installation of the transfer case from the cornfield:



lowering 1: 2:

A standard flywheel is installed. Since the shaft of the box is too long, I had to slightly modernize the design and make spacers. Unfortunately, the clearance cannot be removed, since in this case the clutch will be constantly squeezed.

They made gears for lowering, and the flanges are very close to each other (work was ordered from a turner to reduce the diameter of the upper flange (from the field) by 2.5 mm! (Probably the students did, or someone else gave them flanges and said so that everything is done fine, but no)

Pictures of fasteners for the clutch cable and gas cable, respectively.

The steering column drive looks like this:

So is the mount from the steering column to the lower:

The author began to manufacture wheels for an all-terrain vehicle:


the rear axle was completely assembled (only plates with pillows are not screwed from the top of the spring, in the photo)

Front view of the all-terrain vehicle, already upholstered part of the all-terrain vehicle:

Car bonnet photo:

A bit stuck:


in the swampy swamp:
Overcoming water barriers:
The author of this all-terrain vehicle Andrei F. from the Yamalo-Nenets Autonomous Okrug.