

This all-terrain vehicle with the design of the tipping frame frame was made using two engines. Since both engines are aimed at 1 gearbox, the all-terrain vehicle has the ability to ride on only one running engine, although this reduces its power, thanks to this approach, if one engine fails, the all-terrain vehicle can continue to move.
Materials and assemblies used in the construction of this all-terrain vehicle:
1) Two engines from motorcycles Planet and IL.
2) Electric pump from a gazelle
3) fan from vaz 2106
4) gears from the T-40 final drive
5) stars for 12 and 72 teeth.
6) chains from a motorcycle Izh
7) cameras from K-700
8) gear from the starter Kraz
9) ignition from vaz 2108
10) hinge from cardan kraza
Let us consider in more detail the stages of creating an all-terrain vehicle and its main nodes.
All-terrain vehicle side view:
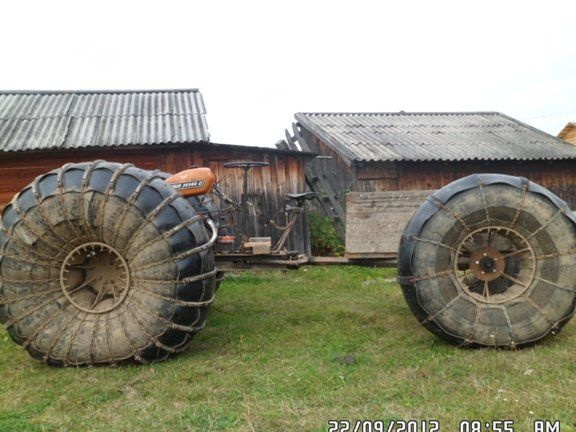
So the all-terrain vehicle looks in front:

Homemade design wheels were made:

Used chains with hooks:

A radiator is installed, as well as a pump and fan:

Steering was installed on an all-terrain vehicle:


And here is the all-terrain engine with hall sensors and a curtain:

Here are the images of the node connecting the drive unit to the cart:

There is also a second leading part. to connect it, the following part is needed:
A two-engine all-terrain vehicle was disassembled, one gearbox was left:

Based on the gearbox, the design of the all-terrain vehicle was redesigned into one engine for each drive part:


As you can see the fan without a casing, but the operation of the engine does not require its inclusion. when traveling on difficult routes the casing will be installed:

The total gear ratio is 280 with a 70-tooth star:

When tested on water, an all-terrain vehicle plunged along the edge of the wheel rims.
The second leading half of the all-terrain vehicle was assembled, and the author proceeded to install the steering and engine on it.

And here is the connection node of these two halves:

To create the steering gear was used from the crown of the flywheel. The lever turned out to be small, so the control is not the most convenient. On the first half, the rail is homemade, so the lever is twice as much as this.

A gearbox was installed, a star for 70 teeth could not be installed, since there is not enough space. Therefore, stars were used for 53 teeth from a motorcycle.It remains to equalize the gear ratio on both parts of the all-terrain vehicle, or make an intermediate shaft and install a star on 18 teeth.

When traveling, the passenger sitting on the second half of the all-terrain vehicle must include speeds on the second engine, in addition, he will be able to control the gas, although only the driver of the first half will have general control.
The gas tank is installed on a separate rack, for greater convenience and in order that the vibrations of the engine would not be transmitted.
This is what the combined all-terrain vehicle looks like:

he is on top:

Back view:

In more detail, the fracture unit of the all-terrain vehicle frame:

At the same time, the author made a second all-terrain vehicle of the same design :.


Cameras were obtained for both all-terrain vehicles:

For comparison, cameras from the edge are visible nearby, now the author has a decent margin in case of damage to the stake:
Next, we analyze the main breakdowns of the all-terrain vehicle.
When traveling from vibration, the hose jumped off and antifreeze flowed out, water was poured in its place and traffic resumed, unfortunately the engine jammed from the front from this.

two bolts were broken by 10, the other two bolts were also bent as a result of breakage. The corners are also bent, as seen in the photo.


An UAZ was called from the village, which brought the cart. the cart was connected to the working part of the all-terrain vehicle and the author rode on it. the non-working part was towed by an UAZ to the repair site in the village.

The author’s adventures didn’t end there, because at the level crossing the wheel on a trolley lowered, but the path was continued on one wheel.


After analyzing the engine, it turned out that the cause of the engine wedge was not water at all instead of antifreeze, but not diluted gasoline, which the author poured into the tank before the trip. Since in both tanks there was gas before this, the engine did not jam immediately, and the second engine did not manage to jam at all.
All-terrain transmission scheme:
Some more photos:




















The engines were redone for liquid cooling. The gearbox was made by the author himself using gears from the VAZ 2106. The steering of the all-terrain vehicle is quite tight due to the solid axis. The transmission has a chain drive. Two hall sensors are installed: one for driving forward, and the second for moving backward, since the all-terrain vehicle does not have reverse gear. To move back, you must turn off the engine and start it with the second hall sensor in the opposite direction.
The wheels used are K-700 cameras, which are wrapped with conveyor belt
All-terrain vehicle clearance is 50 centimeters.
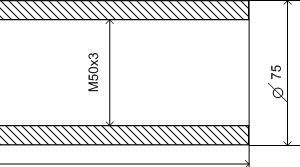
The steering was done by the author on his own. To do this, he used a gear from kraz and a home-made curved gear rack. The hinge from the kraz kardan was also involved, to which the m50 bolt with a screwed-in nut was welded. Corners from the rear bogie are welded to the nut. The author did not install rotation limiters, so the trolley is able to rotate all 360 degrees. The author expects to make another leading part of the all-terrain vehicle, which he will later attach instead of the trolley and get an all-terrain vehicle with all-wheel drive.
This design has its drawbacks, for example, not very convenient gear shifting. Although the all-terrain vehicle does not require frequent gear changes, since the first and second are mainly used, thanks to the large wheels, the all-terrain vehicle moves quickly enough under any conditions of the route, even at second speed.
The all-terrain vehicle has a mass of 700 kilograms, but it is easy to hold on water, as the Krazov cameras provide excellent swimming ability.
The author of an all-terrain vehicle with the nickname "Petrovich11" from the Khanty-Mansi Autonomous Okrug-Yugra.