
I bought a cool toy for my son on Ali - an excavator on a radio control.
It turned out to be a serious defect, which is expressed in the absence of boom limiters. Those. if you raise the arrow to the maximum, then it starts to crack, the same applies to the rotation of the tower around the axis (670 degrees). As a result, now there is often a crack even with a small load. Around the axis it generally rotates in one direction with great difficulty. I disassembled this device and the idea came to me to upgrade it.
1. Replace the engines on the chassis with others, more powerful (although this is in question for now). And make an adjustment for speed. Now the speed is one, constant - forward or backward.
2. Set the boom movement limiters, which would reach the maximum boom lift and stop, then only in the opposite direction.
3. Replace the motors in the boom with stepper motors or servos. Here the help of understanding people is really needed. Which is better for this role? And is it suitable at all? I would like the excavator to cope with the tasks to feel a little more complicated than loading loosened sand, although this is difficult for him now - the gears are cracking ...
4. The battery is more powerful and larger to install. There, in the case, are steel bars for a counterweight. You can just fill the space. There is a lot of space for experiments :)
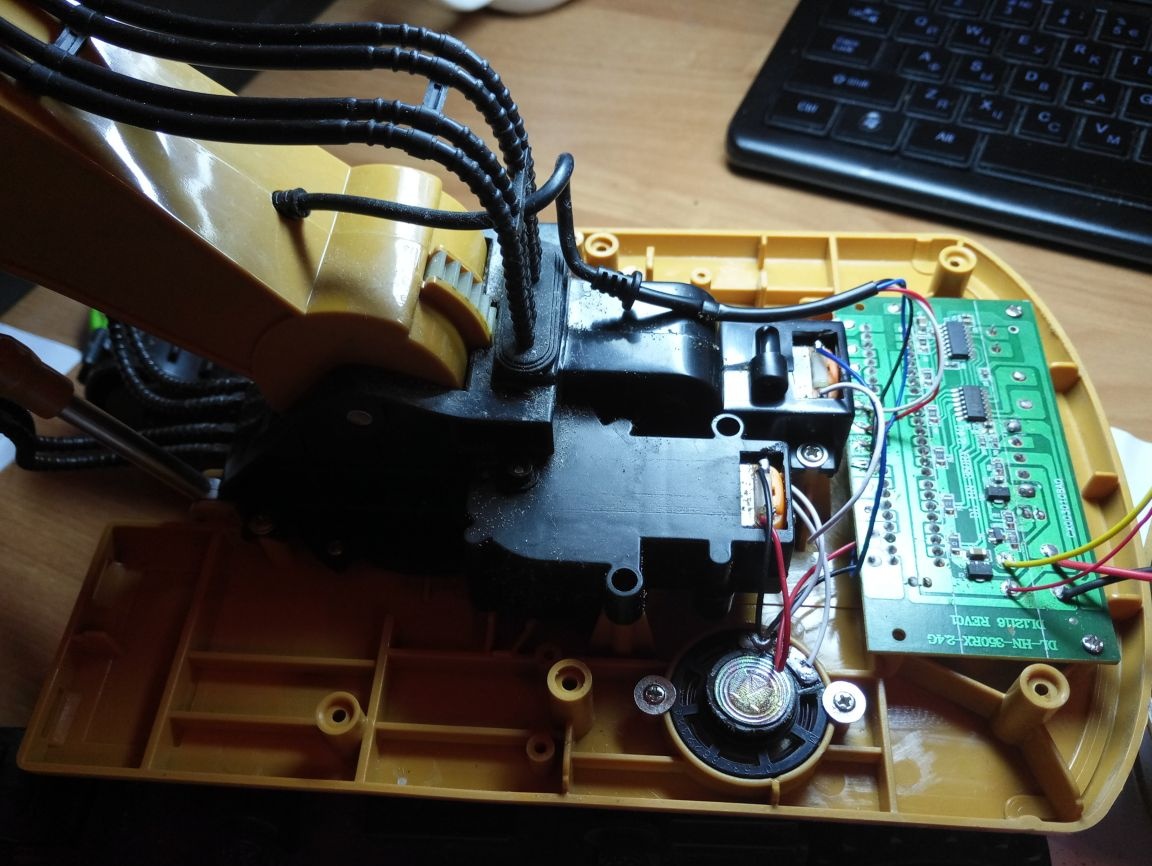
5. Accordingly, I want to replace the board in the excavator itself with an arduino and add a WiFi module to control the device. The remote will also have to do another. Here the question is. Which arduinka to take? which one will cope? Nano, uno? What will be needed is to connect 6 engines to the arduino (chassis - 2, to the tower, and 3 to the boom). Is there likely to need a voltage stabilizer?
In general, what can you advise for the implementation of this idea? If you believe that the task is not feasible, then explain for what reason please. I really want to do with my son, even if he is accustomed to learning new things, and not to learning ... :)
PICTURES.
the mechanisms themselves were disassembled only in the chassis did not climb into the arrow