
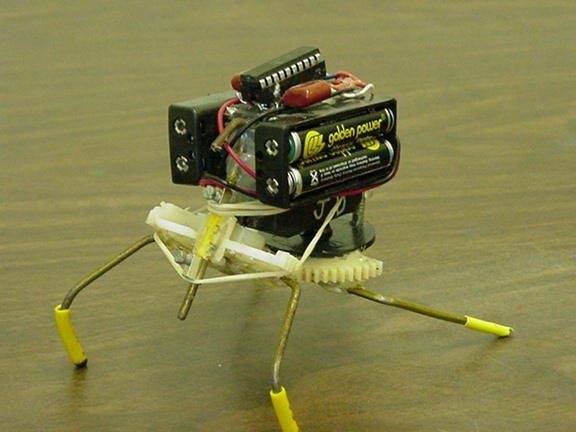
There is nothing more interesting than a walking robot, because such robot imitates the best living creatures that live with us on our planet. To make such a robot is not difficult, but you need to have a desire and some skills in the field of electronics.
Materials and tools:
- a piece of copper wire;
- two holders of finger batteries;
- two monolithic ceramic capacitors of 0.22 mF each;
- one 3.3M resistor;
- 74NST240 octal inverter chip for eight channels (one);
- 20 pin DIP 74XX240 or 74XX245 (one);
- servomotor (one);
- switch;
- one plastic gear;
- wire connector.
Manufacturing process:
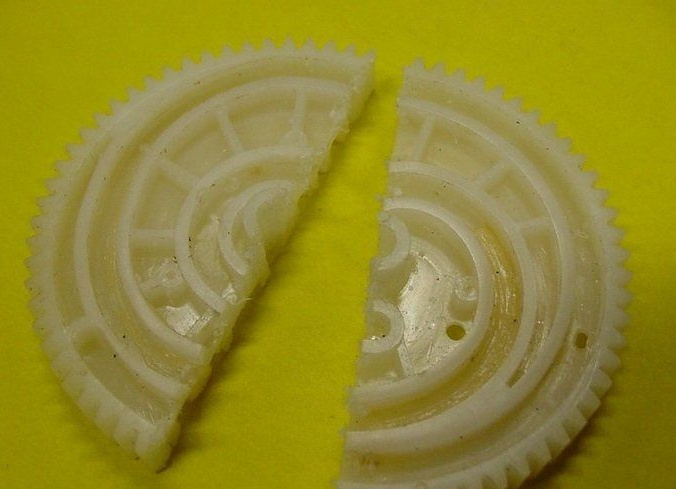
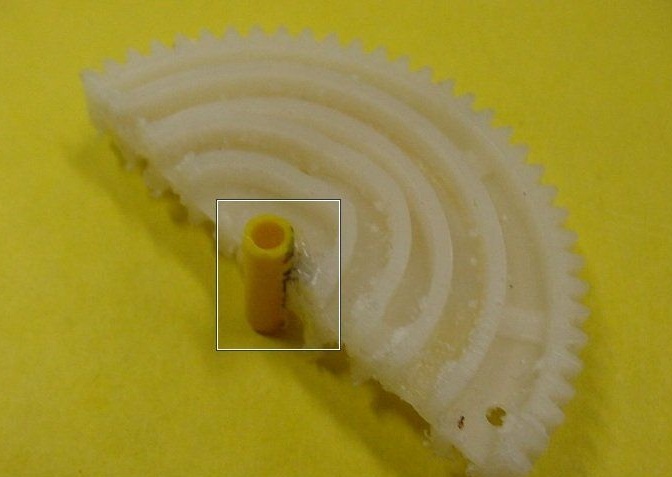
Step one. Gear preparation
You need to take the plastic gear and cut it into two identical parts. Then you need to remove the horn and use glue to fix it to one semicircle.

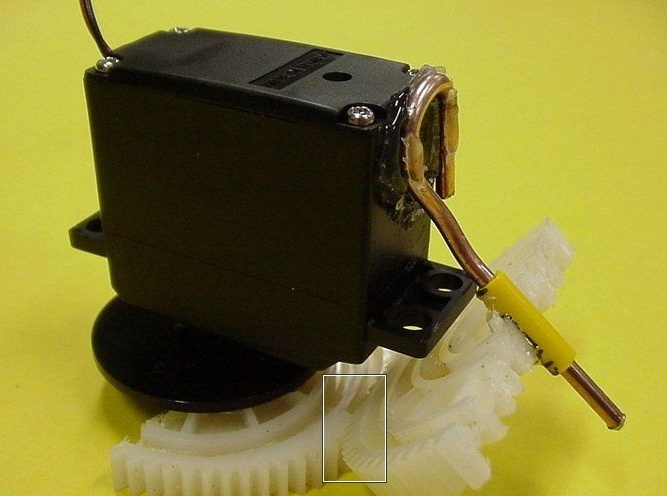
Step Two Alteration of the engine
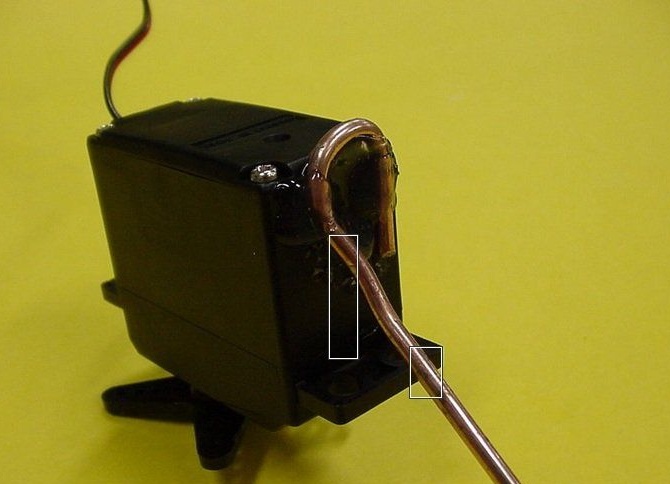
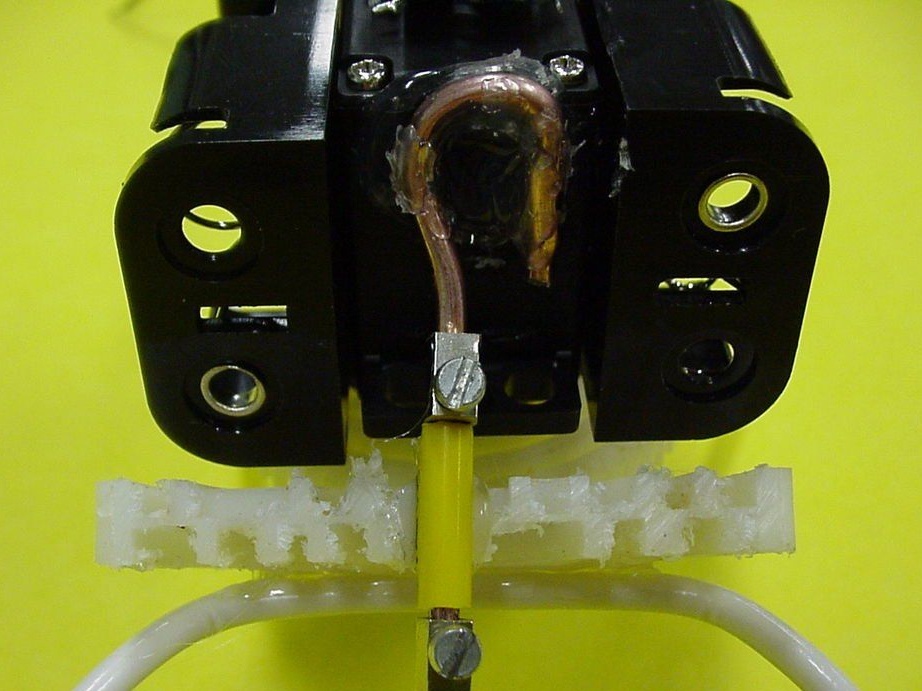
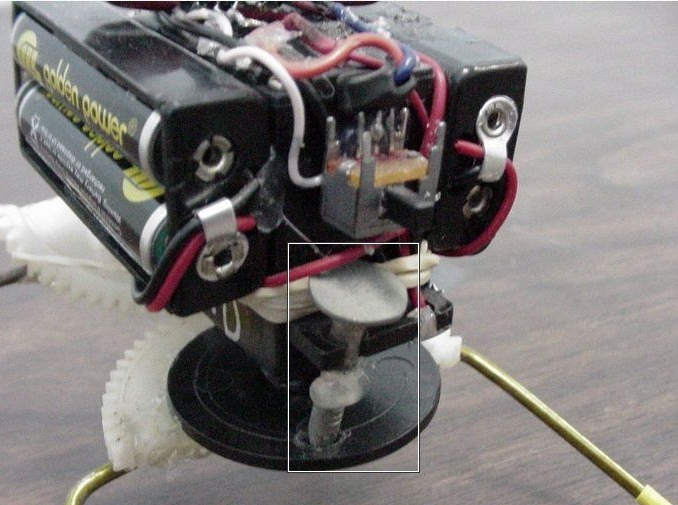
The servomotor must be redone so that it only works on rotation. Then you need to glue the copper wire to it, as indicated in the picture.
Also at this stage you will need a plastic tube of suitable diameter, it must be glued to the semicircle. The servomotor horn is subsequently placed in its original place. Then put a plastic tube on the copper wire. At this stage, the work can be considered completed.

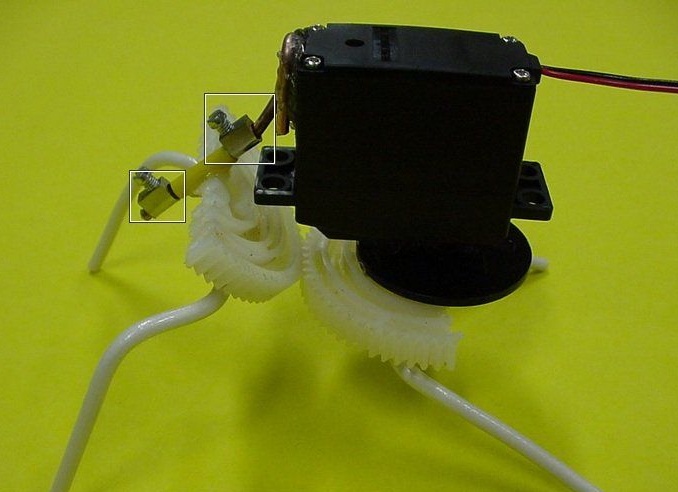
Step Three Creating and installing robot paws
Copper wire is used as legs, it must be bent as indicated in the picture. Then the author glues the paws to the semicircles. You can now also attach battery holders to the servomotor.


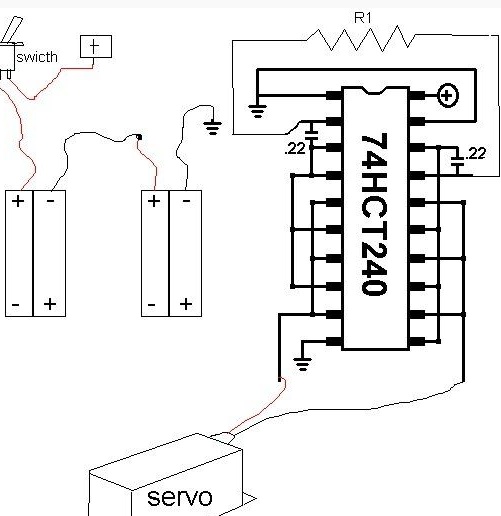
Step Four Work with electronics
Perhaps this is the most difficult and crucial moment. The entire system must be connected clearly as indicated in the diagram. Immediately after connecting the robot will be ready, and it can be tested.

By changing the angle of the legs, you can achieve various characteristics from the robot. You can do it faster or slower. You can also equip the robot with additional controls, for example, a mustache, by which it will determine the obstacle. You can also equip a robot with eyes in the form of LEDs, this will create even greater realism of the likeness of a living being.
You need to run such a robot on a flat surface. To prevent his legs from slipping, Cambrices can be worn at their ends.